🚗 Step 7: Finishing the Front Wheel Assembly Copy
We will connect the steering bar onto the front servo. Start by flipping your car upside down. Here is what you will need:

Grab the steering bar that you made earlier and use the Rocker Arm Fixing Screw to connect it to the servo.


Make sure that you press the Rocker Arm into the gear on the servo at a 90 degree angle as shown.
Grab your two front wheel assemblies.
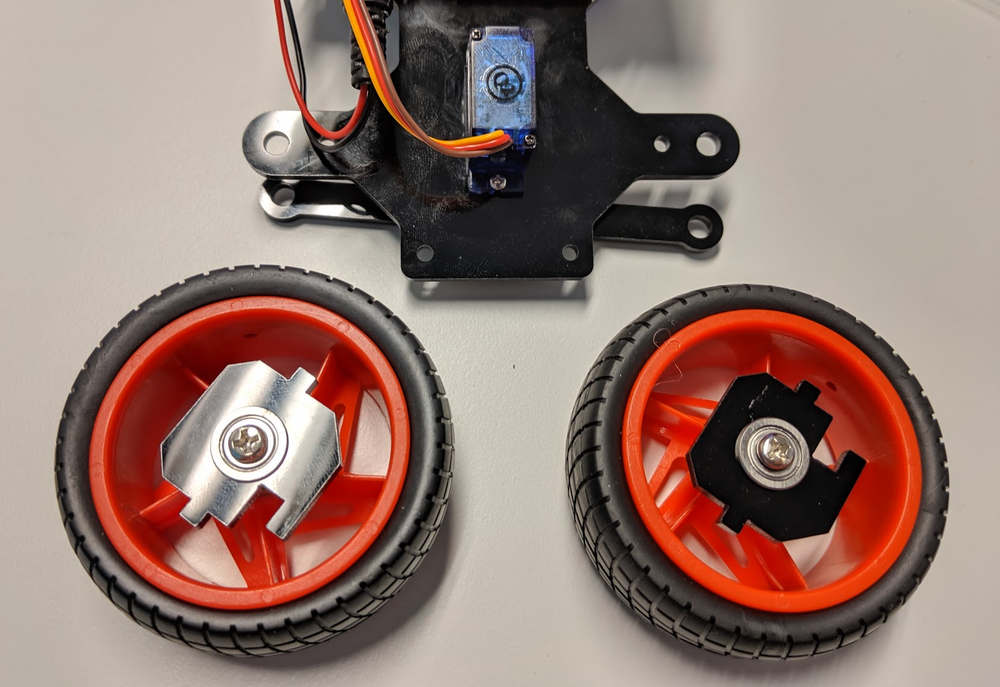
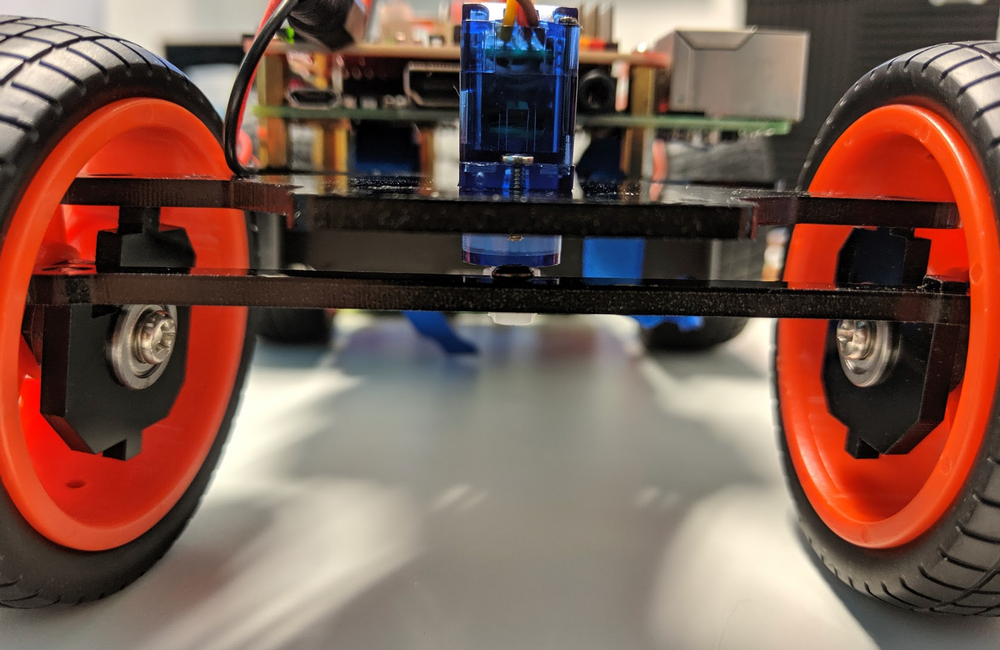
To connect the wheels, insert the hole at the end of the steering bar onto the top notch of each steering connector plate for each front wheel assembly. Then, push the bottom of the steering connector plate into the hole on the front chassis.

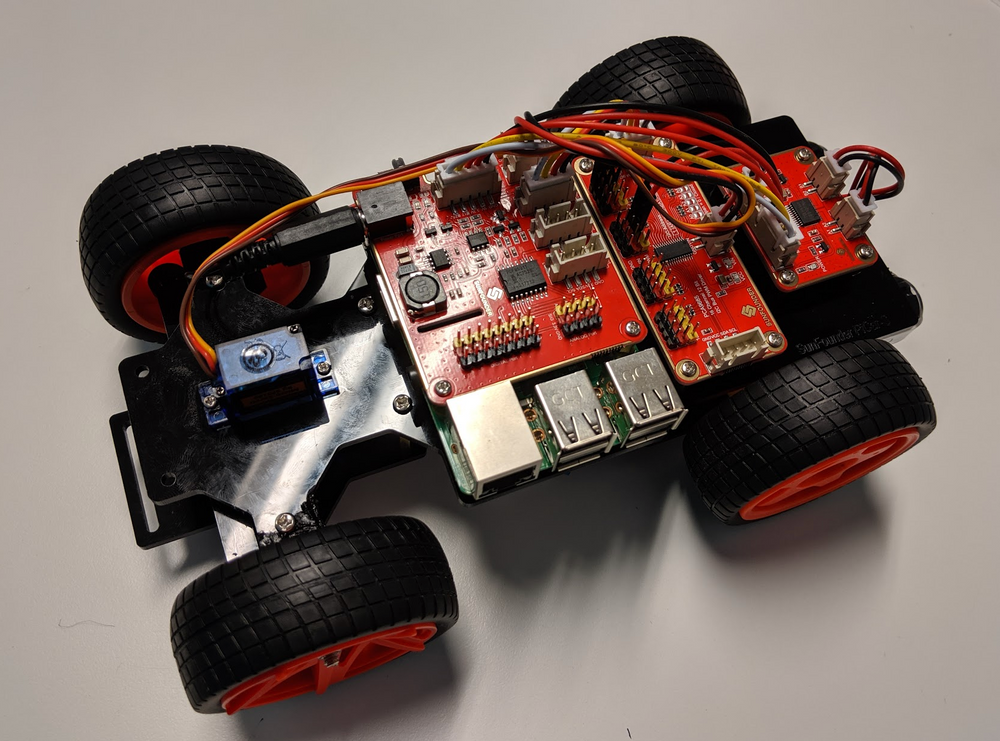
Try to keep the servo centered while you do this. It will look something like this when you are done:
Now, get the front half chassis with the standoff screws and mount it to the underside of the car using four M3x8 screws.


Do not over tighten! These screws can snap the acrylic frame.

That’s it! You are now done with the hardware and basic software configuration.
In the next section, we are going to do some additional configuration of the car and prepare it to self-drive.