Attaching the Lower Arm Parallel Link
In this section, you will be attaching the Lower Arm Parallel Link to the turret. This will help your robot arm move in the expected motions and help prevent any catastrophic failures.
Parts and Hardware
- PN14 – Lower Arm Parallel Link
- Turret Assembly
- One M3x14 Screw
- One nyloc nut

Attaching the Lower Arm Parallel Link
Follow the steps below to attach the parallel link, to the turret:
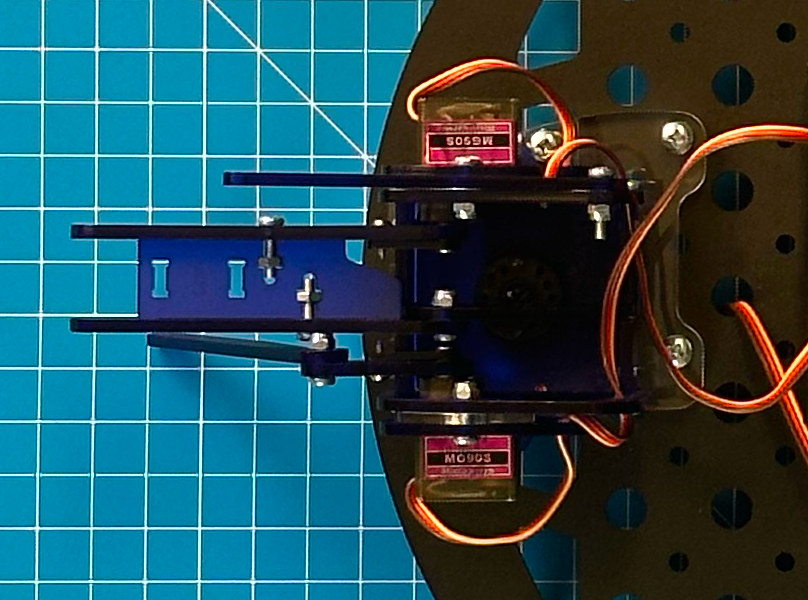
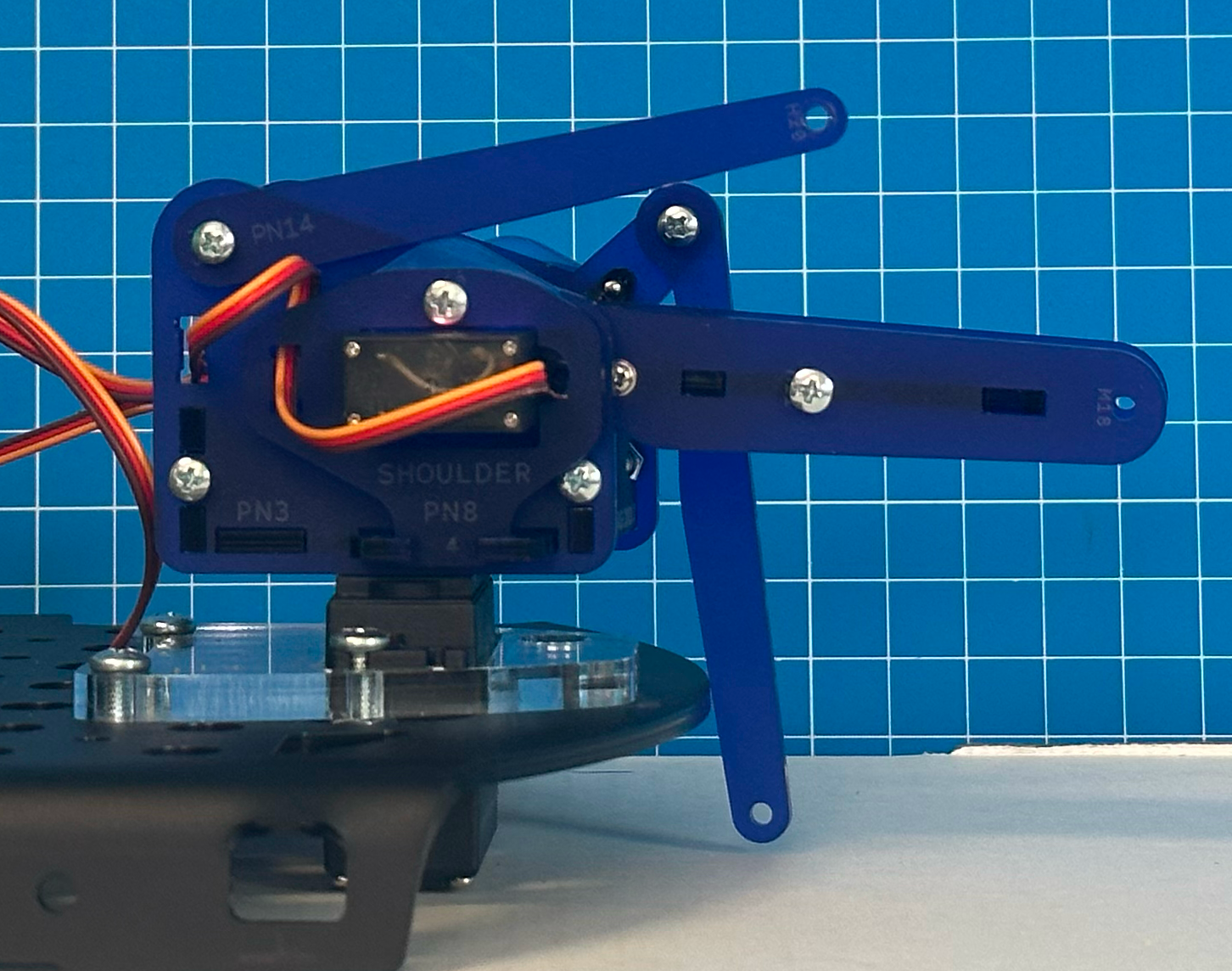
- Attach PN14 to the turret assembly using joint H23 on PN14 and joint M23 on PN3 on the turret using the M3x14 screw.
- Tighten the screw and nyloc until they are secure but turn smoothly using two fingers. You may notice that this screw is particularly long. This is to act as a stop to help prevent the arm from getting stuck.