Attaching the Turret to The Workbench Base
In this section, you will be attaching the turret to the Workbench Base to keep it in place as you build.
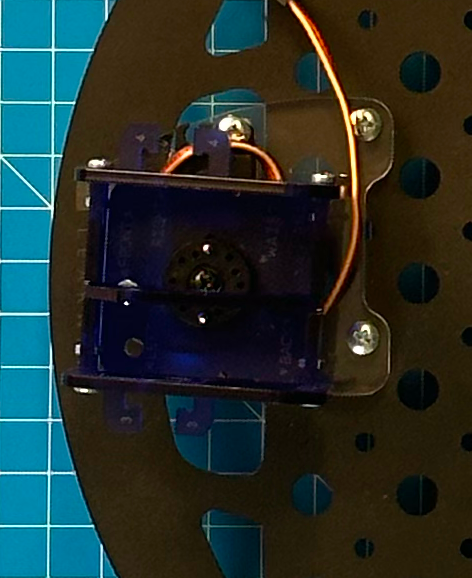
The turret will operate as the "waist" of your robotic arm and allow you to achieve motion in the X-axis or more simply put, it will allow your arm to turn left and right!
Parts and Hardware
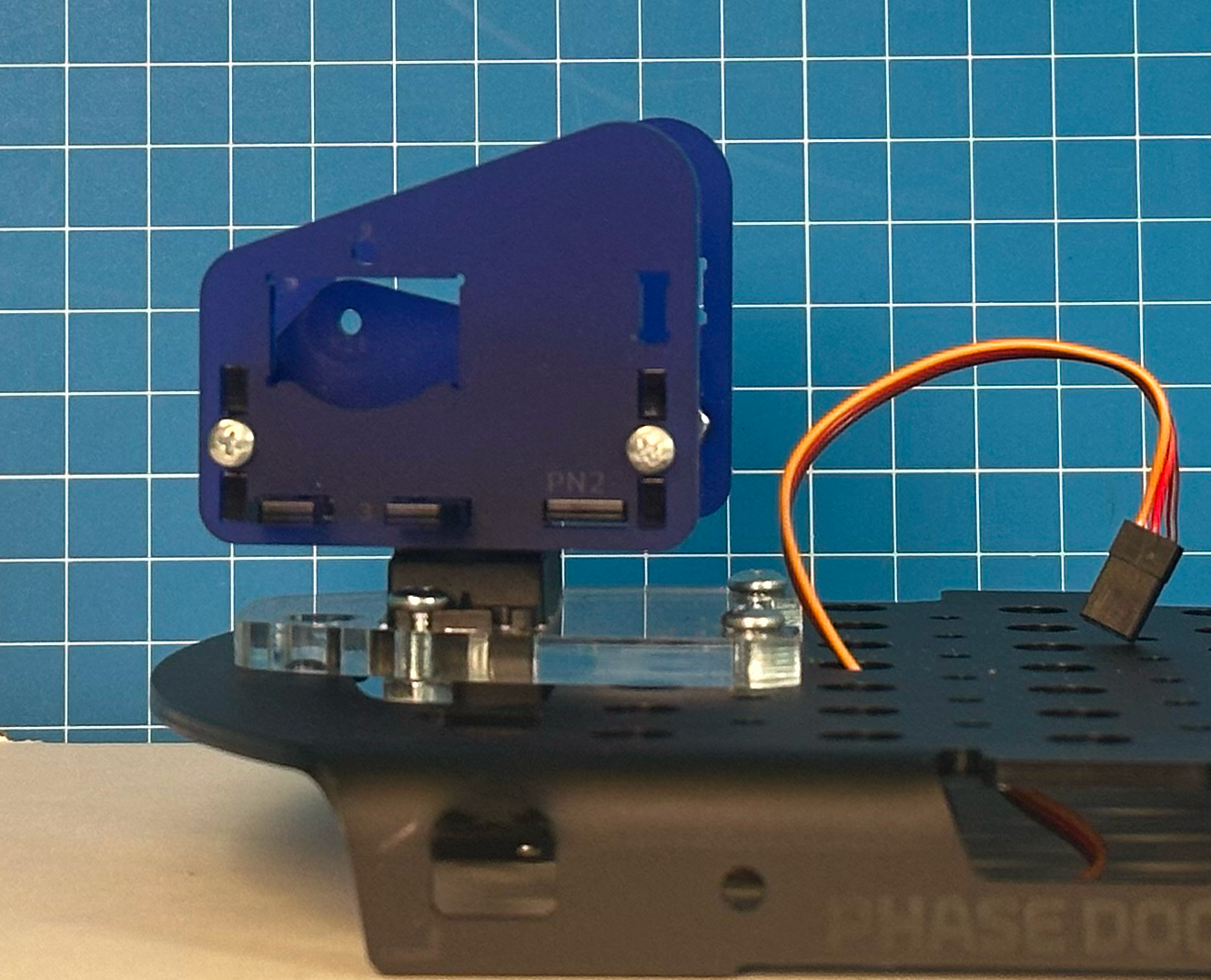
- Assembled Turret
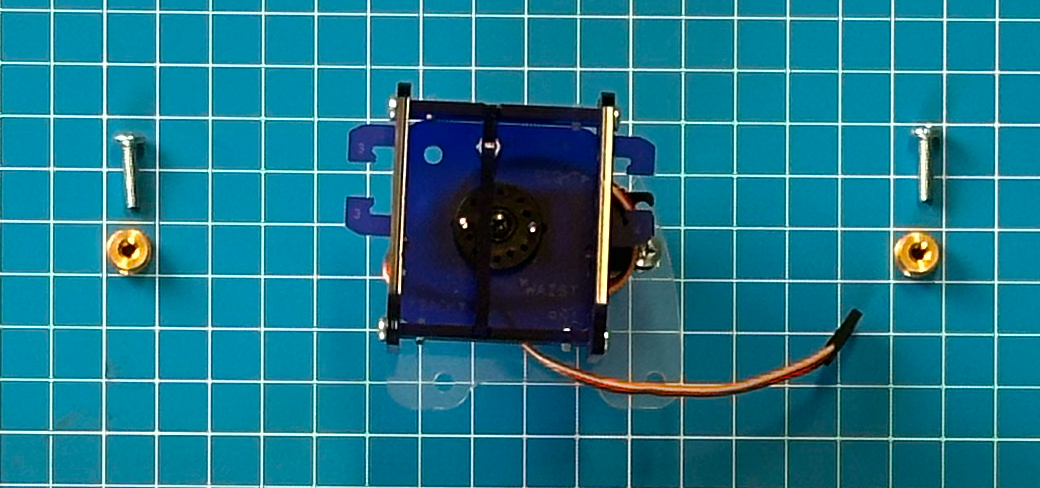
- Two 8 x 32 screws
- Two Brass thumb nuts
- Workbench Base
Attaching the Turret to The Workbench Base
Follow these steps to attach the turret assembly to the Workbench Base:
- Add the turret assembly to the base by inserting the servo into one of the handles and aligning the holes on the Workbench with the holes on the clear plate.
- Secure the turret using two 8 x 32 screws and two brass thumb nuts with the screw heads facing up.
- Route the cable underneath the base and up through the row of holes closest to the turret.